我院碩士研究生張子康在國際學術期刊《Sensors》上發表了題為“UAV Imagery Real-Time Semantic Segmentation with Global–Local Information Attention”的SCI論文,提出了一種利用全局-局部注意力和特征融合的方法用于對無人機實時圖像進行語義分割。
在無人機圖像的實時語義分割中,當前的輕量級算法缺乏圖像中全局和局部信息的整合,導緻分類類别中的漏檢和誤分類。本文提出了一種集成多尺度全局上下文信息的無人機實時語義分割方法。該原理利用UNet結構,編碼器采用Resnet18網絡來提取特征。解碼器包含一個全局-局部注意力模塊,其中全局分支在垂直和水平方向上壓縮和提取全局信息,局部分支通過卷積提取局部信息,從而增強圖像中全局和局部信息的融合。在實時無人機語義分割上,該方法有效平衡了精度和實時性。
論文鍊接:https://doi.org/10.3390/s25061786
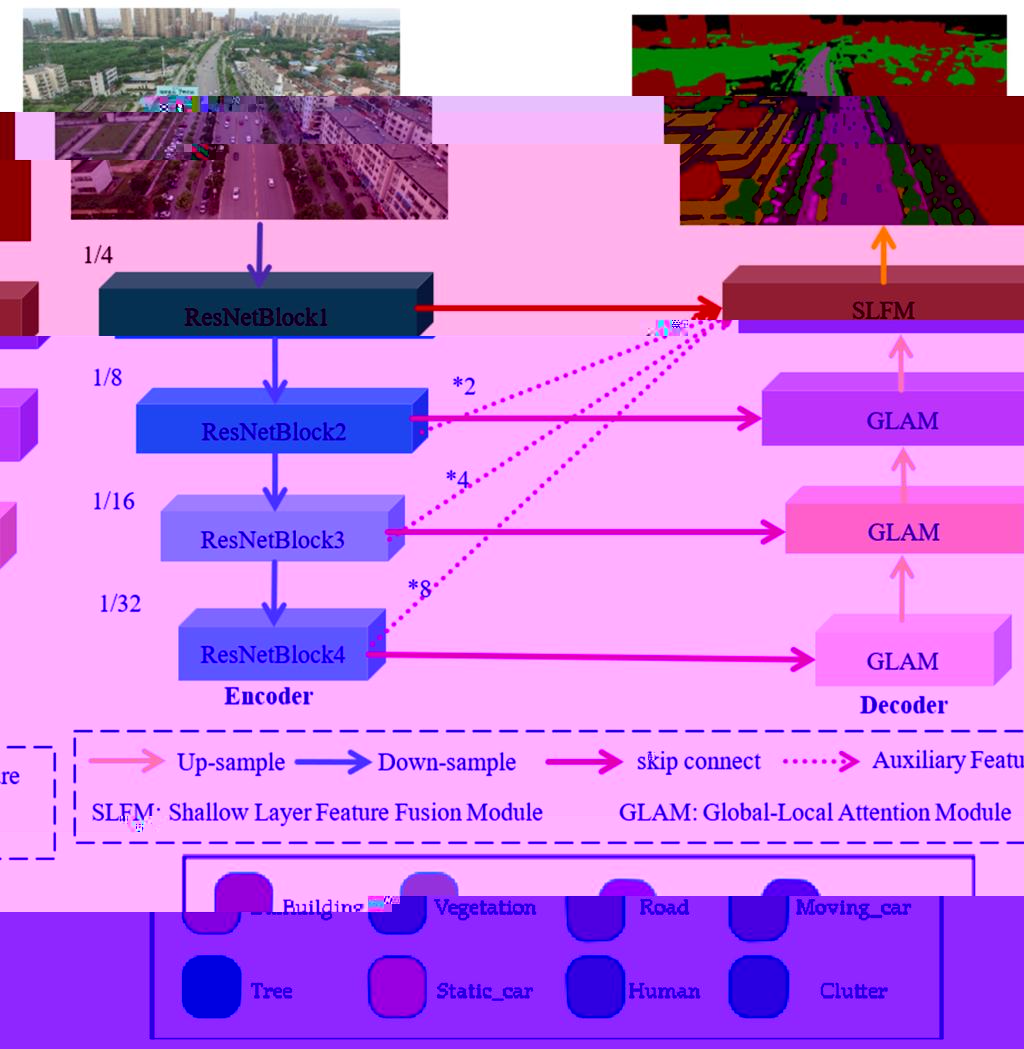
圖1 網絡結構圖

圖2 論文首頁

